촉각과 공기의 흐름까지 감지하는 생체 모방 전자 피부 개발
에너지화학공학부 이승구 교수 연구팀
 (좌) 이승구 교수, (우)자레이 모하마드 연구교수
(좌) 이승구 교수, (우)자레이 모하마드 연구교수
설치류의 수염 감각은 공기의 흐름과 장애물을 정밀하게 감지하는 고도로 발달된 촉각 시스템으로, 이를 모방한 전자 피부(e-skin) 기술이 주목받고 있습니다. 그러나 기존의 인공 수염 센서는 크기와 무게가 크거나 개별 센서로 작동하여 유연성과 실용성이 부족해 한계가 있었습니다. 이에 울산대학교 이승구 교수 연구팀은 유연하고 가벼운 인공 수염이 포함된 전자 피부를 개발하여 기존 기술의 한계를 극복하고, 보다 정밀한 촉각 감지 기능을 구현하는 연구를 진행하였습니다.
[연구필요성]
설치류(쥐)의 수염은 공기의 흐름과 장애물을 감지하는 정밀한 생체 센서로서, 주변 환경을 인식하고 이동하는 데 중요한 역할을 합니다. 이러한 자연 시스템에서 영감을 받아, 인공 수염을 통합한 전자 피부(e-skin)를 개발하는 것은 로봇, 의수·의족, 인간-기계 인터페이스에서 정밀한 촉각 감지를 향상시키는 데 필수적입니다. 하지만 기존의 인공 수염 센서는 크기가 크고 무겁거나 개별 센서로 작동하여, 유연하고 가벼운 응용 분야에 적합하지 않은 한계가 있었습니다. 또한 개발된 전자 피부는 피부와 수염이 통합되어 있지 않기 때문에 여러 유형의 기계적 자극을 동시에 감지하는 기능이 부족합니다. 이에 따라 단일 센서로서 높은 촉각 감도를 제공하면서 동시에 다양한 자극을 구별하고, 시각을 사용할 수 없는 환경에서도 효과적인 감각 인식을 지원할 수 있는 새로운 접근법이 필요합니다.
[연구성과/기대효과]
울산대학교 에너지화학공학부 이승구 교수와 자레이 모하마드 연구 교수는 인공 수염이 포함된 생체 모방 전자 피부를 개발하여 촉각 감지 성능을 향상시키는 데 성공했습니다. 이번 연구는 세계적인 학술지 Advanced Science에 게재되었으며, 개발된 전자 피부는 공기의 흐름과 장애물과 같은 기계적 자극에 대해 높은 감도를 나타냈습니다. 특히, 설치류의 수염 감각을 모방하여 주변 환경을 보다 정밀하게 인식할 수 있도록 설계되었습니다.
이 전자 피부는 높은 유연성과 안정성을 갖추고 있으며, 넓은 감지 범위를 제공하여 인간-기계 인터페이스, 로봇 공학, 웨어러블 전자기기 등 다양한 응용 분야에 활용될 수 있습니다. 또한, 개발된 기술을 로봇 쥐에 적용한 결과, 주변 사물을 인식하고 공기의 흐름의 방향을 실시간으로 인식할 수 있는 능력을 확인하였습니다. 이를 통해, 시각적 정보 없이도 주변 환경을 감지하는 '비시각적 인지' 기술 발전에 기여할 것으로 기대됩니다.
[본문] - 연구 내용 요약
이승구 교수 연구팀은 전자 피부(e-skin)와 인공 수염을 동시에 포함하는 유연한 인공 피부를 개발했습니다. 연구팀은 유연한 잎 구조에 전도성 은나노와이어와 카르복실화 다중벽 탄소나노튜브(MWCNT)를 코팅해 전극을 설계했습니다. 이를 고분자 탄성체 필름에 내장하고, 피부 내부에 균일한 공기 주머니를 형성해 민감도를 크게 향상시켰습니다. 또한, 피부 터치, 수염 터치, 수염을 통한 공기 감지 등 여러 가지 복합적인 자극을 동시에 구별하는 능력을 보였습니다.
특히, 로봇 쥐에 적용했을 때 장애물을 피하고 출구를 찾으며 외부 자극에 능동적으로 반응할 수 있음을 확인하였습니다. 이러한 다기능 감각 인식 기술은 로봇, 의수·의족, 첨단 인간-기계 인터페이스 분야에서 폭넓게 활용될 수 있을 것으로 기대됩니다.
[용어 설명]
1. 전자 피부(E-Skin)
인간 피부의 감각 기능을 모방하여 기계적, 열적, 화학적 자극을 감지할 수 있는 유연한 전자 소재.
2. 인공 수염(Artificial Whiskers)
설치류의 수염 감각을 모방하여 공기의 흐름, 장애물, 진동 등을 감지할 수 있도록 설계된 합성 구조.
3. 비시각적 인지(Blind Perception)
시각적 입력 없이 주변 환경의 공기 흐름과 장애물을 감지하여 공간 인지 능력을 향상시키는 기술.
[그림설명]
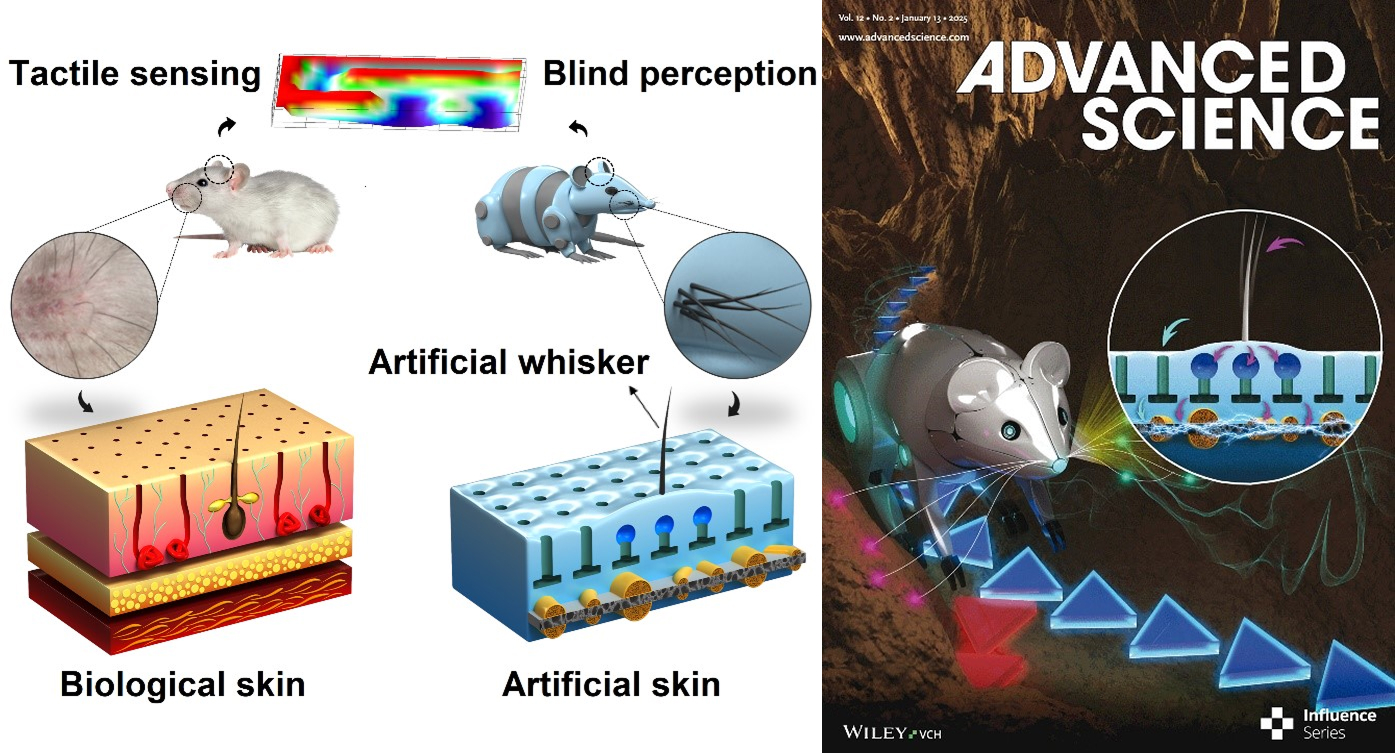 1. 설치류 피부에서 영감을 얻은 공공 수염 기반 생체 모방 전자 피부의 구조적 설계
1. 설치류 피부에서 영감을 얻은 공공 수염 기반 생체 모방 전자 피부의 구조적 설계
2. 이번 연구는 2025년 1월호Advanced Science의 표지 논문으로 선정됨 (http://doi.org/10.1002/advs.202570012)
해당 연구에서는 설치류의 촉각 감각 시스템을 모방한 인공 수염 기반 전자 피부를 개발하였으며, 이는 공기 흐름과 장애물을 정밀하게 감지할 수 있는 뛰어난 성능을 보였습니다. 연구의 표지 이미지에는 이 전자 피부를 적용한 로봇 쥐가 깜깜한 터널을 탐색하면서 장애물과 공기 흐름을 감지하는 모습이 담겨 있습니다.
· 연구 시작 배경
설치류의 수염 감각 시스템은 뛰어난 촉각 감지 기능을 제공하여 장애물을 탐색하고 정밀한 환경 인식을 가능하게 합니다. 하지만 기존의 인공 수염은 크기가 크고 유연성이 부족해 전자 피부에 적용하기 어려웠으며, 현재의 전자 피부 기술 또한 수염 감각을 통합한 사례가 없었습니다. 이에 따라 연구팀은 피부와 수염의 감각 기능을 결합한 생체 모방 전자 피부를 개발하여, 보다 정밀한 촉각 감지 시스템을 구현하는 것을 목표로 연구를 진행하였습니다.
· 연구과정 중 어려웠던 점
이번 연구의 가장 큰 난제는 유연하면서도 높은 감도를 갖춘 인공 수염을 설계하는 것이었습니다. 또한, 인공 수염과 전자 피부를 하나의 감각 플랫폼으로 통합하면서도 안정성과 감도를 유지하는 것이 기술적으로 어려운 부분이었습니다.
· 기존 연구와의 차별점
- - 기존 인공 수염은 크기가 크고 별도의 힘 센서를 필요로 하지만, 본 연구에서는 가볍고 유연한 전자 피부 기반의 인공 수염을 개발하여 보다 실용적인 촉각 감지를 가능하게 함.
- - 기존 전자 피부 기술은 피부 접촉 감지에 초점을 맞춘 반면, 이번 연구에서는 피부와 수염 감각을 통합하여 복합적인 촉각 감지 기능을 구현함.
- - 높은 자율성, 정밀성, 방향성을 갖춘 인공 피부로서 로봇 및 의수·의족 등의 응용 분야에서 활용 가능성 증대.
- - 최초로 능동적인 인공 수염과 전자 피부를 하나의 시스템으로 통합하여 촉각 감지 및 비시각적 인지 기능을 동시에 구현함.
이번 연구를 통해 개발된 인공 수염 기반 전자 피부는 차세대 웨어러블 전자기기 및 인간-기계 인터페이스 기술의 발전에 중요한 기여를 할 것으로 기대됩니다.